Forms Of Closed Loop Stepper Control
Forms Of Closed Loop Stepper Control Roboticstomorrow

Advertisement Ebay Stepperonline 1 Axis Closed Loop Stepper Cnc Kit 4 6 N M 651 54 Oz In Nema 34 In 2020 Stepper Motor Steppers Axis
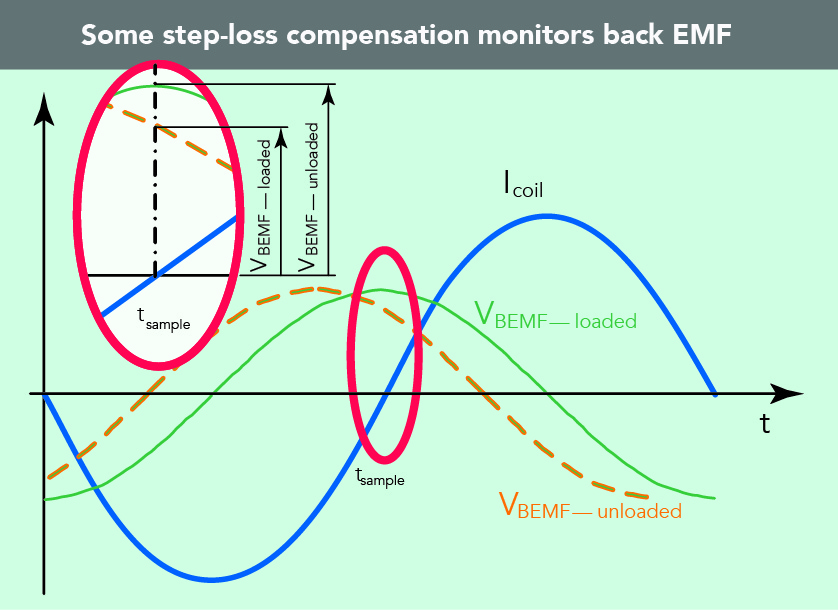
Faq What Is Closed Loop Stepper Motor Control With Step Loss Compensation
Keep Your Step Motor Position With A Closed Loop Motion Control System

Toauto Integrated Closed Loop Nema23 Stepper Motor With Driver Ihss57 36 20 2nm 36v Position Encoder For Lazer 3d Printer Cnc Control Amazon Com Home Kitchen

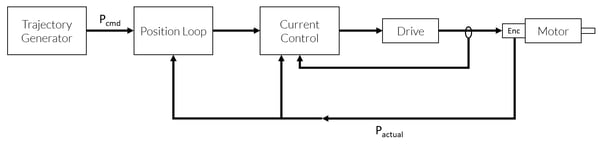
Bringing Closed Loop Functionality To Stepper

Closed loop operation brings with it the risk of instability if the loop is not correctly tuned so care must be taken to achieve stability.
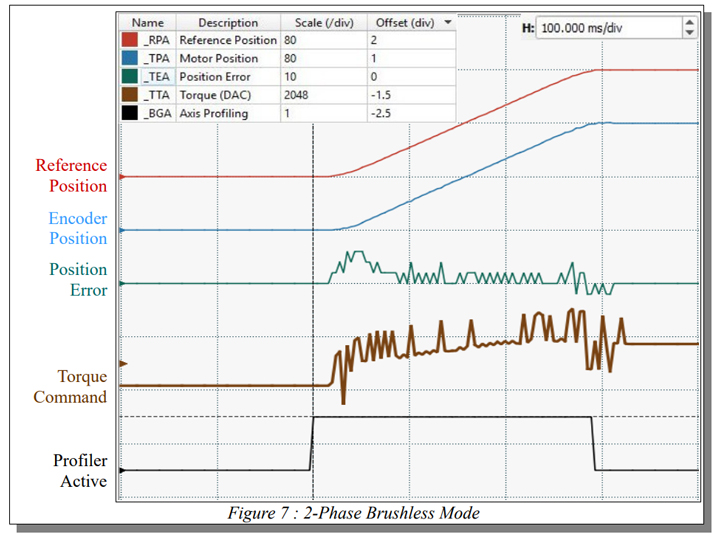
Forms of closed loop stepper control.

Open Loop System Vs Closed Loop System Motion Control Tips

Setup Of Leadshine Hbs507 Closed Loop Or Hybrid Servo Step Driver Youtube Loop Setup Drivers

Pin By Stepperonline On Closed Loop Stepper Motor Driver Stepper Motor How To Fall Asleep Luxury Store

Difference Between Closed Loop And Open Loop Hydraulic System Fundamentals And Applications Of Hydraulic Systems Hydraulic Mechanical Engineering Technology
Source : pinterest.com
